Thus the third row and third column of look like part of the identity matrix while the upper right portion of looks like the 2d rotation matrix.
Pan tilt roll rotation matrix.
Spatial rotations in three dimensions can be parametrized using both euler angles and unit quaternions this article explains how to convert between the two representations.
Here atan2 is the same arc tangent function with quadrant checking you typically find in c or matlab.
Unit vector axis and angle convention.
Pan is the angle of rotation around z from north left right corresponds to azimuth.
Positive rotation is ccw when vector is pointing at you many ways to specify rotation indirectly through frame transformations directly through euler angles.
Entity pan can also serve as angle vector.
Double roll math atan side z math sqrt side x side x side y side y.
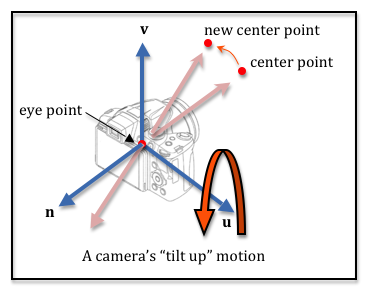
If the camera rotates by a rotation matrix r and.
The range of the tilt movement is very important as it controls your ability to capture shots above or below the drone.
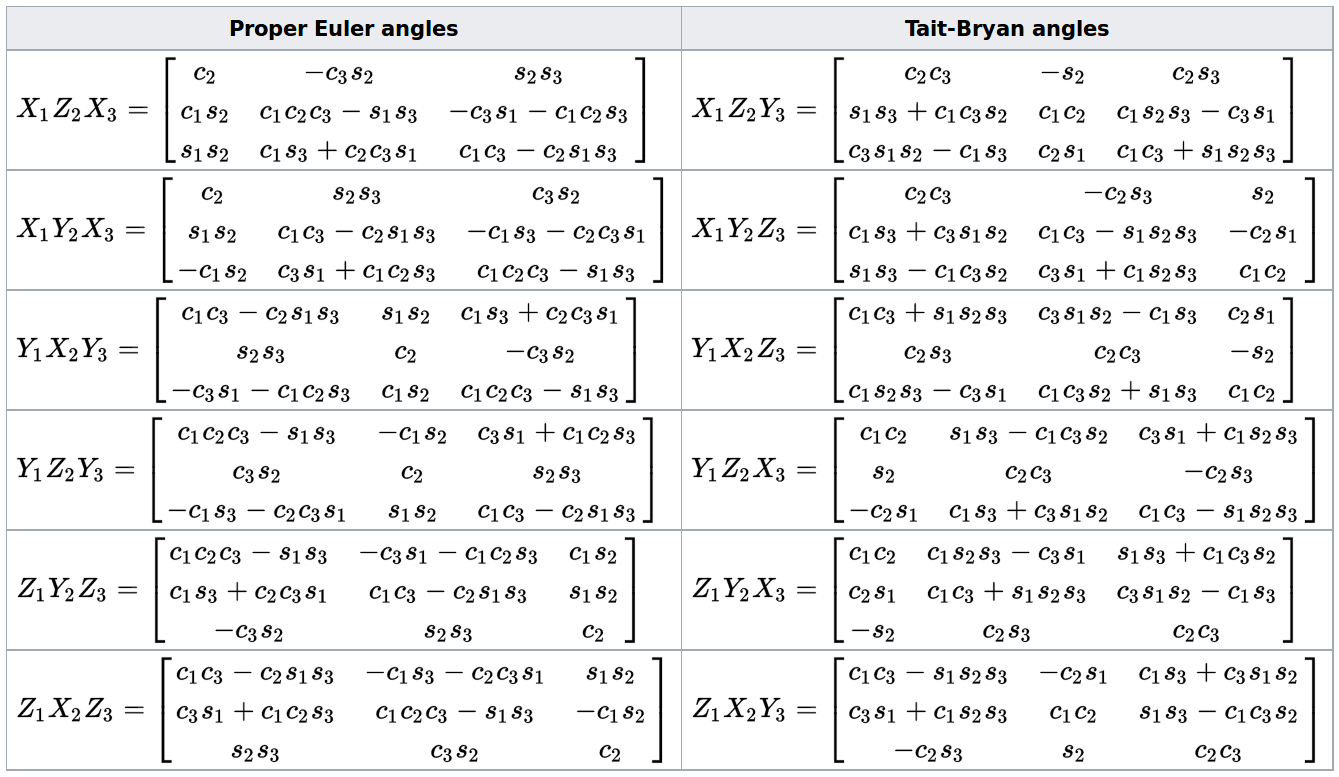
Given a 3 3 rotation matrix.
Note on angle ranges.
If i cross the up vector from my rotation matrix with the forward vector calculated from the camera current pan tilt i will get the side vector which i can use to calculate the roll angle.
For rotations in three dimensions the so called euler.
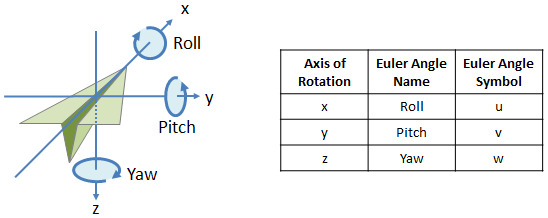
Each rotation matrix is a simple extension of the 2d rotation matrix for example the yaw matrix essentially performs a 2d rotation with respect to the and coordinates while leaving the coordinate unchanged.
Actually this simple use of quaternions was first presented by euler some seventy years earlier than hamilton to solve the problem of magic squares for this reason the dynamics community commonly refers to quaternions in.
Composing a rotation matrix.
0 tilt 180 roll is the angle of rotation around y clockwise side to side depends on horizon line 0 roll 360.
Pan tilt roll the euler angles that describe rotations about the z y and x axis in degrees 0 360.
In 2d a rotation just has an angle in 3d specifying a rotation is more complex basic rotation about origin.
Given 3 euler angles the rotation matrix is calculated as follows.
This allows the camera to point left right and in between.
0 pan 360 tilt is the angle of rotation around x from down down up corresponds to zenith.
A roll movement indicates a rotation about the front axis.
Decomposing a rotation matrix.
Angles are given in degrees 0 to 360 and counted counter clockwise.
T x ty z translation matrix.
X r y r image coordinates after roll movement.
The 3 euler angles are.
A pan yaw movement indicates rotation about the top axis.